栏目导航

PEK-130模块之三相正弦脉宽调变逆变器规划
发表时间: 2023-12-12 02:25:32 作者: 行业新闻
,并使其输出近似正弦波且为等幅不等宽的电压波形。根据正弦波电压和三角波的巨细和频率,可界说为下列两个目标,其一为调变目标 (Modulaton Index)为:
式中Vcontrol为三相正弦波电压峰值巨细,Vtri为三角波峰值的巨细。
当ma≤1时,称为逆变器的线性调变区,亦即当输入正弦波电压指令的峰值比三角波峰值小时,输入电压巨细会与逆变器输出电压根本波的线-线电压巨细成正比。其三角波与正弦波如下图所示:
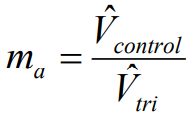
空间向量脉宽调变便是使用电压空间向量的观念,即由逆变器之六个功率组件的开关切换状况来发生旋转的电压向量空间,典型的三相变频器如图所示,其每相各有两个开关组件置于上臂及下臂,分别为上臂的S1、S3、S5及下臂的S2、S4、S6。在空间向量脉宽调变的操控形式下,逆变器每相开关组件的导通状况为互补式,即代表若上臂导公例下臂截止,反之若上臂截止则下臂导通。在操控上通常在开关导通前参加一延迟时刻以防止上臂与下臂功率组 件一起导通形成功率组件的损坏,此一延迟时刻称之为死区时刻。在此界说开关导通状况a、b、c相每一臂之开关导通状况,若a=1则代表上臂开关导通下臂开关截止,a = 0则代表上臂开关截止下臂开关导通。因此三相逆变器之输出状况共有八种,每一种状况发生的线对线电压,相电压之输出成果(直流链电压为VDC)列于下表。
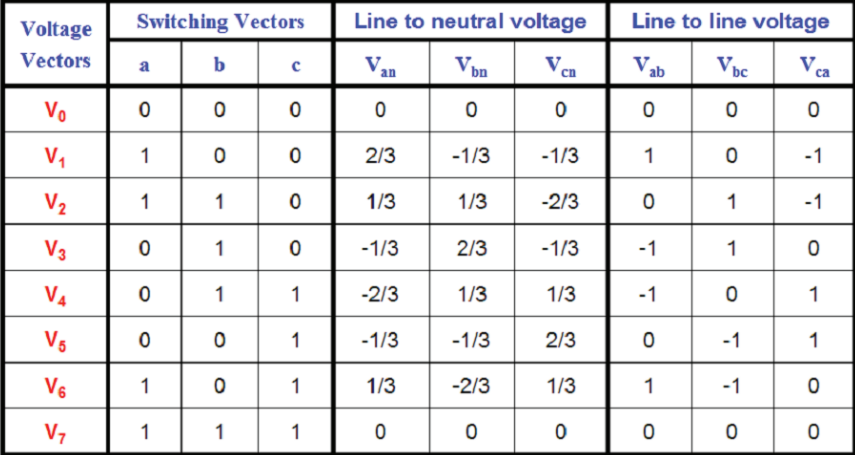
由上表能够得知,三相逆变器输出之相电压和线间电压之联系,经由坐标轴转化至αβ平面上可得下表,其转化之联系式为:

因此即由此八种开关切换状况将可得到八种不同的电压向量。此八个电压向量称为根本电压向量,分别为六个有用电压向量V1、V2、V3、V4、V5、V6及两个零向量V0及V7。因此可使用此六个有用电压向量将电压空间平面分为六个区间,如下图所示。其间αβ平面之α轴及β轴乃相关于沟通马达定子之水平轴及垂直轴,Vref则为输出之参阅电压向量。
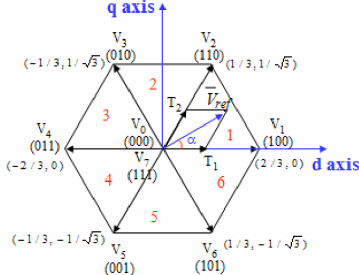
任何巨细之输出之参阅电压Vref能够用图中六个有用电压向量中之任两个向量表明,而此输出电压在这两个有用电压向量之重量(导通时刻)可用代数办法求得。
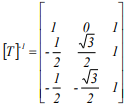
将三相abc停止坐标轴转化至αβ停止坐标轴体系,此转化称为Clark转化。根据下图所示两个坐标体系之间的联系,得出如下式的坐标转化式:
反之,将坐标轴αβ转化至三相abc坐标体系,此转化称为反Clark转化,转化公式可表明:
以上为由三相abc坐标体系与停止坐标体系之间联系式,其转化矩阵前的不决系数,若是选用非功率不变规律此为3/2,

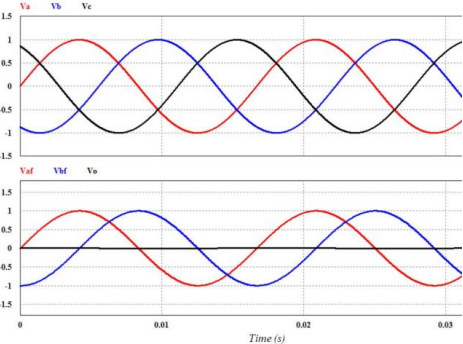
本文是选用非功率不变规律。此外,关于三相平衡体系,因此在做停止坐标轴转化时,零序重量是可被疏忽的。下图是选用PSIM仿真abc停止坐标轴转化至αβ停止坐标轴之波形图。
前一节透过坐标轴转化将abc停止坐标体系转化至ab停止坐标轴体系,本节进一步将αβ停止坐标轴转化至DQ同步旋转坐标轴体系,此转化称为Park转化,此刻假定三相体系为平衡,零轴重量可被疏忽,并将DQ轴与αβ轴一起放在二维向量平面上,如图3.7 所示,此旋转坐标以ωe角速度来旋转,故可得坐标转化公式:
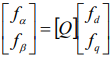
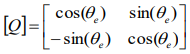
反之,将旋转坐标体系DQ轴转化至ab坐标体系,此转化称为反Park转化,则转化公式可表明:
桥臂直通,因为Ld足够大,也不会形成直流电源短路,但换流时刻长,会使体系功率下降,因此需缩短tγ,即减小Lk值。
的意图。内容概述本文主要从体系分析、硬件规划、程序规划和试验测验四个方面论述“
微电网模仿体系模块规划陈述标题:微电网模仿体系摘要本文针对微电网模仿体系研究布景,规划了可编程逻辑器件FPGA为操控中心的两个
针对当时电网需要能输出高质量的沟通电,且需具有较好的负载适应性及调压、调频等问题。规划了根据 STM32F103C8T6 单片机操控的 DC-AC
的规划 /
电路图 /
呢? /
单片机过渡嵌入式开发?STM32的MPU能够跑LNIUX体系,米尔STM32MP135中心板开发板(二)



